Kongsberg Geospatial will be exhibiting at XPONENTIAL taking place May 11–14 in Detroit, Michigan.
Visit us at Booth 34013!
Book a Meeting
.jpg)
Written
June 22, 2026

Written by the Engineering Team, Kongsberg Geospatial
On Sunday, June 14, 2026, the University of Maryland’s UAS Research and Operations Center (UROC) achieved a major milestone for uncrewed aviation. Their Penguin B VTOL completed a 33-mile flight across the Chesapeake Bay, from Kitts Point to Crisfield and back.
This marked the first non-DoD sponsored Beyond Visual Line of Sight flight across the Bay conducted without a chase aircraft. Operating within Navy Restricted Airspace managed by Patuxent River Air Traffic Control, the mission demonstrated how advanced BVLOS operations are moving from demonstration toward real-world capability.
When an uncrewed aircraft travels 33 miles over open water without a chase plane, the pilots on the ground are completely dependent on data to provide aircraft status and changes in the environment. They rely entirely on their control systems, operational data, and connectivity to maintain continuous, positive control of the aircraft.
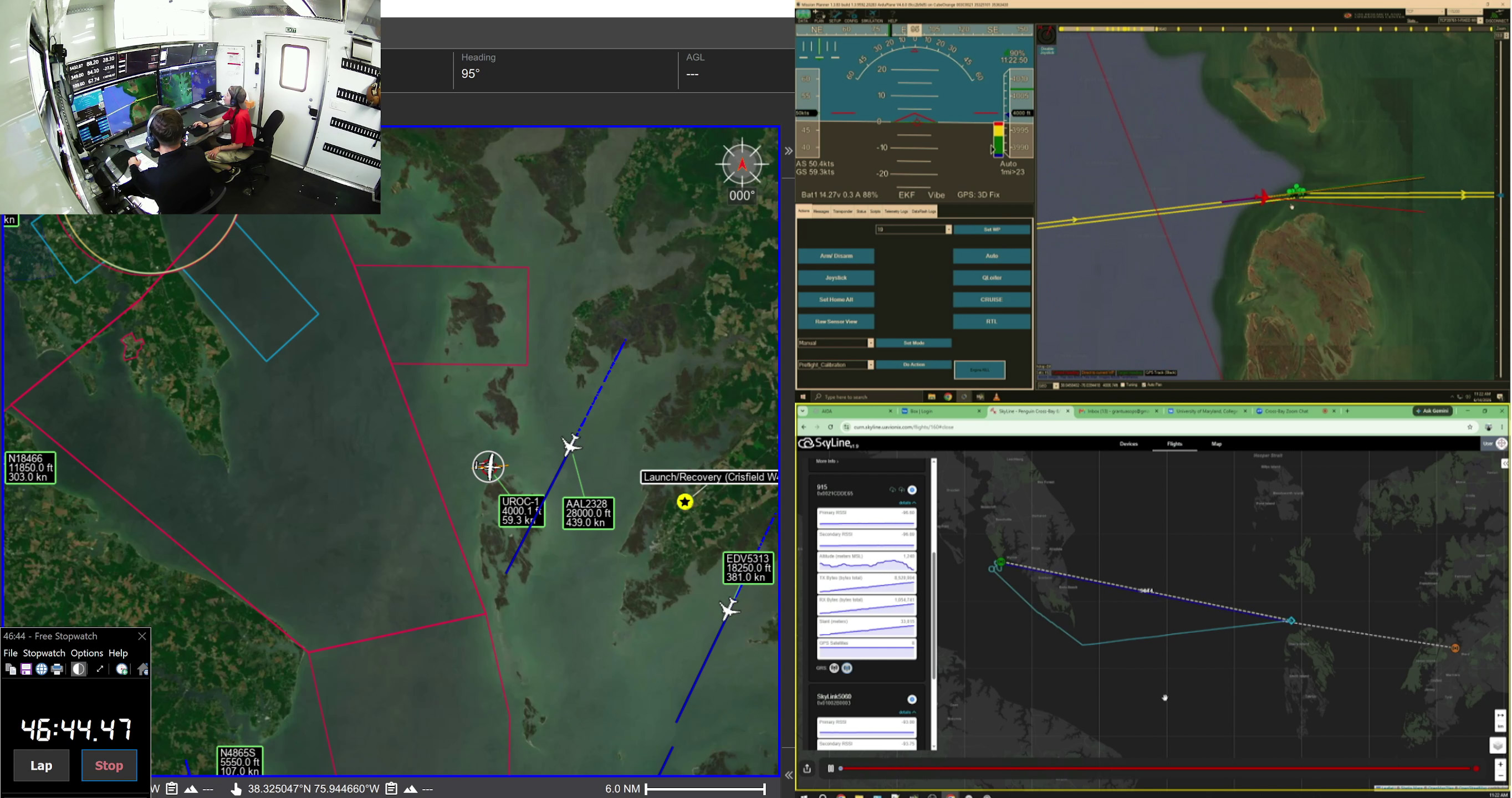
Our software, Iris Terminal, was the primary mission interface used by the UMD team in their mobile command center to maintain airspace awareness and execute this flight safely.
Here is how Iris Terminal served as the operational hub for the mission.
Managing a long-endurance flight over open water requires a significant amount of data. The challenge of routine BVLOS integration is not just flying the drone; it is understanding everything happening around it.
Iris Terminal served as the central display in the UROC command center, ingesting ADS-B traffic in the area, live telemetry from the Penguin B, and tracking the aircraft’s exact position, altitude, and heading in real time.
By turning complex data streams into a clear, high-fidelity visual map, Iris Terminal gave operators the situational awareness needed to confidently conduct the flight beyond visual line of sight.
The flight took place within sensitive military airspace controlled by Patuxent River ATC. Securing approval for a civilian drone to operate in this environment requires meeting a strict standard of safety and accountability.
Iris Terminal provided the airspace awareness needed to support the operation. The software mapped the drone’s position against the planned route and surrounding Navy airspace. This real-time tracking gave the team the data needed to verify that the aircraft remained within approved operating boundaries throughout the flight.
Successful Beyond Visual Line of Sight operations rely on an ecosystem of hardware and software working together seamlessly. During the flight, uAvionix systems provided the command and control aerial radios and transponders, while CubePilot’s Cube Blue powered by ArduPilot handled the autopilot on the Penguin B.
Iris Terminal acted as the software bridge on the ground. Instead of requiring operators to manage multiple disconnected displays, the system brought flight status, connectivity, traffic, weather and aircraft health information together into one interface. A user-defined “keep out” volume of airspace moving with the drone continuously calculated potential airborne conflicts to provide the operator with Detect and Avoid capability. This reduced complexity for the flight team during the long transit.
Kongsberg Geospatial is a fully owned subsidiary of Kongsberg Defence & Aerospace
Back To Top
.svg)